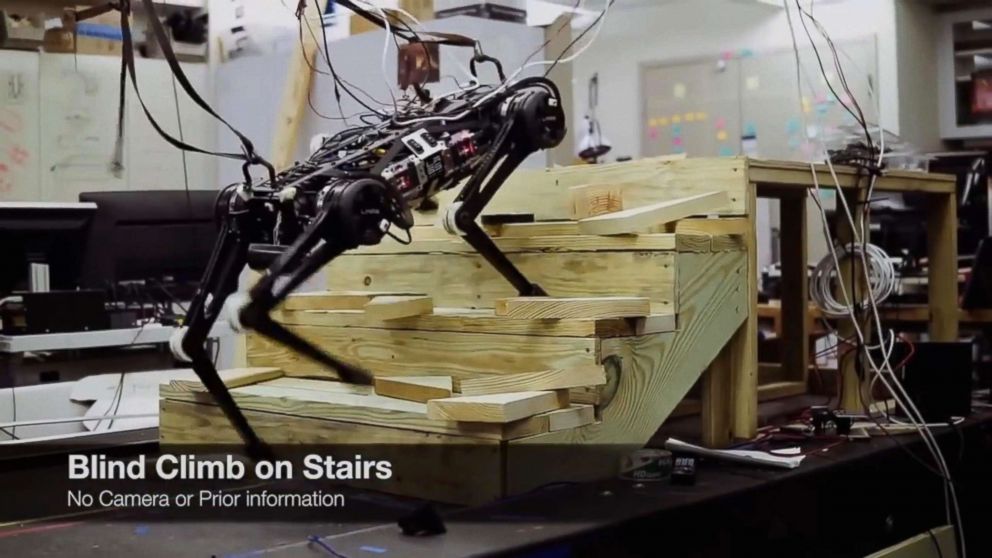
'Blind' Cheetah 3 robot can climb stairs, jump, yank and shove
It may someday do work that's impossible for humans.
The “blind” Cheetah 3 robot can climb stairs, jump on a desk and shove, thanks to new algorithms developed by researchers at the Massachusetts Institute of Technology (MIT).
Cheetah 3 has been designed to do many things in a challenging environment, designer Sangbae Kim, an associate professor of mechanical engineering at MIT, said, according to the university’s news office.
“Vision can be noisy, slightly inaccurate, and sometimes not available, and if you rely too much on vision, your robot has to be very accurate in position and eventually will be slow,” he said. “So we want the robot to rely more on tactile information. That way, it can handle unexpected obstacles while moving fast.”

Kim did not immediately respond to ABC News’ request for comment.
The video, which lasts more than two minutes and is published on the MIT website, shows different examples of physical activity Cheetah 3 can accomplish. At one point it shows the robot climbing up the stairs, jumping onto a desk, running, shoving and slow-trotting. It can also act like a real cheetah.
Kim hopes that blind locomotion Cheetah 3 can cope with some work that’s impossible for humans to do, and researchers will present the robot’s vision-free capabilities at the International Conference on Intelligent Robots, in Madrid in October.
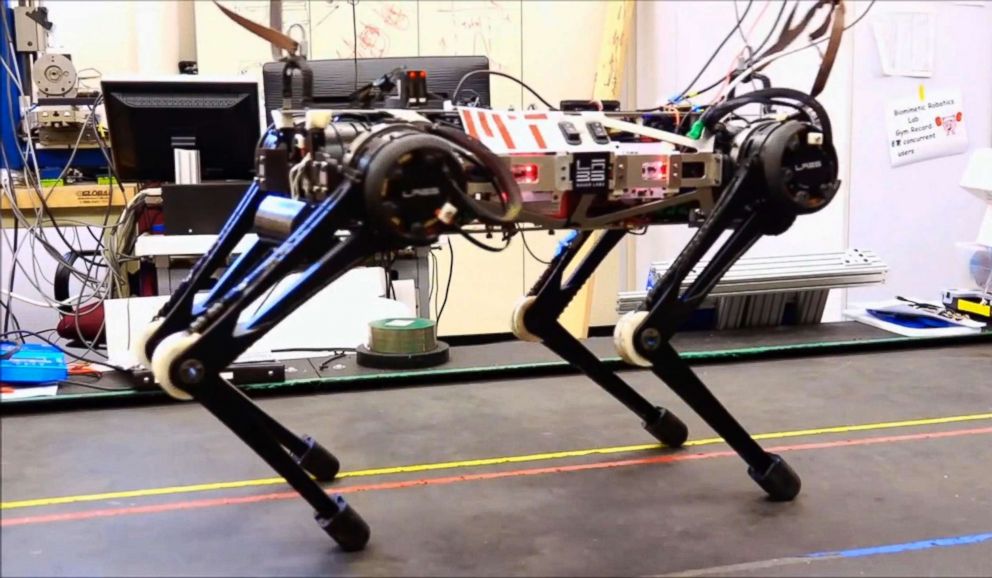
The blind locomotion can stretch backward and forward, and twist from side to side, much like a cat limbering up to pounce, MIT News reported.
“Cheetah 3 is designed to do versatile tasks such as power plant inspection, which involves various terrain conditions including stairs, curbs, and obstacles on the ground,” according to the office.
"I think there are countless occasions where we [would] want to send robots to do simple tasks instead of humans. Dangerous, dirty, and difficult work can be done much more safely through remotely controlled robots.”

Popular Reads
ABC News Live